

一、引言
海洋观测系统是地球观测系统的主要部分之一,在天—空—岸—海一体化立体观测系统中,卫星海洋遥感或空间海洋学又占据着重要的地位。海洋的广袤性,使得海洋遥感技术自1960至1970年发端后,逐步成为海洋观测系统的最重要手段之一。1978年的海洋遥感三部曲(Tiros-N,Nimbus-7,Seasat-A)开创和证明了海洋遥感的巨大应用价值。1990年代开展不同遥感技术的业务/准业务应用,至2000年后,全面展开业务应用(包括水色遥感在内),海洋遥感已经成为业务化海洋学、海洋观测预报、防灾减灾等不可或缺的工具。
中国空间地球观测及卫星海洋遥感体系的发展也是日新月异。随着中国航天科学与技术的进步,自2002年第一颗发射的海洋水色水温卫星HY-1A、2011年发射的海洋全微波遥感卫星HY-2A、2016年发射的GF-3合成孔径雷达海洋监视监测卫星,中国卫星海洋遥感业务应用已步入全体系布局的快速、稳健发展的道路,并逐步接近欧美先进水平,自主航天工程与技术已涵盖卫星工程的90%以上。但总体上,中国对地观测科学与技术的原创不足,模仿和跟跑现象依然比较明显。当然,兼容国际相关空间对地观测技术、夯实国际同类业务应用卫星体系也是中国卫星遥感发展必须承担的责任。随着国家整体科技能力的提高,之前借鉴国外遥感器技术发展道路的“尾灯效应”理念已无法进一步指导中国海洋遥感科技的发展,急需地球系统科学、海洋科学的创新牵引。如何能前瞻性、引领性地推动自主航天技术的发展是十分重要的课题。
在海洋观测系统领域,面向大科学问题的解决、面向长期气候变化核心要素的高精度观测,创造性地提出空间对海观测的中国方案,是中国空间对地观测体系“技术推动,科学牵引”,科学与技术相互迭代发展,进而达到国际前沿领先的必由之路。
目前,国际海洋卫星遥感探测能力和技术依然存在很多需要突破的盲区和技术局限。主要体现在以下6个方面:
①现有的海洋遥感技术总体上是二维平面遥感,与海洋业务及科学应用所需的水体剖面或三维探测需求存在巨大的差距。传统的海洋光学遥感(即水色遥感)也仅是海洋上层50m以内水体的积分式成像观测;微波、红外遥感器,都只是在二维平面进行海洋水体的皮层遥感,其探测深度在毫米(微波)、微米(红外)量级。而海洋学中的基本参量和要素都是随着深度垂向层化的,如温度、盐度。一些基本的海洋现象,如洋流、涡旋、海洋生物、水体颗粒物、声速剖面等,都要求随深度变化的特性观测。尽管海洋现场观测技术装备耗费巨大且采样稀疏,但因其垂向探测能力依然是海洋观测系统的基础。
②现有海洋遥感技术可以观测的海洋变量的数量与精度和地球系统科学及业务化海洋学要求的观测精度还有很大的差距。国际对地观测系统委员会CEOS针对全球气候观测系统GCOS定义了一组核心气候观测变量ECVs,并提出了利用观测系统实现的四项具有很大挑战性的长期首要目标:闭合碳估算问题、闭合全球水循环问题、闭合全球能量平衡问题、阐明生物圈的条件变化。这四项目标,既是地球系统科学问题的首要目标,也是业务应用系统发展的长期目标。地球观测系统核心观测变量ECVs中的海洋部分,就是全球海洋观测系统GOOS所提出的31个核心海洋观测变量EOVs。要实现这31个EOVs的观测(图1),遥感技术不可或缺。但遥感技术的探测能力、探测精度等方面仍然与EOVs的观测需求有巨大的差距。目前的海洋遥感只能实现11个EOVs的观测。对于多个次表层参数和过程及水声等方面,遥感观测还是空白;浮游动物生物量等的探测也仅仅开始,仍存在很大的不确定性。
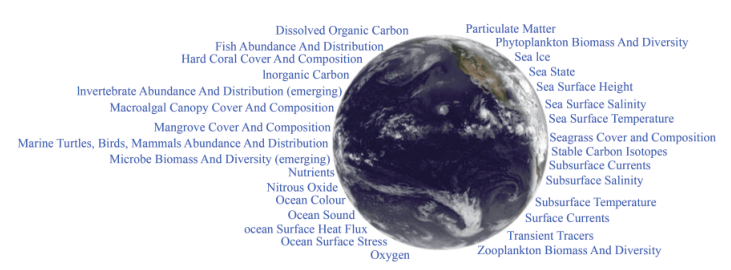
图1 全球海洋观测系统(GOOS)要求的31个核心海洋观测变量(EOVs)
从探测精度来看,以业务化遥感观测参数中最成熟的海表温度SST红外探测为例,气候观测要求在100km空间尺度10年时间尺度上的稳定度在0.03K,国内外现有业务应用型红外遥感器的单次观测准确度(Accuracy,或不确定度Uncertainty)水平在0.5K左右,是否能达到气候观测的要求还存在争议。现有星载高精度红外遥感器的辐射分辨率(Precision或Resolution)已达到几个mK级,但其准确度受限于星上定标黑体的不确定度。历史上,1995年发射的欧洲ERS-2卫星搭载的先进沿轨迹扫描仪(AATSR)星上黑体定标不确定度为0.1K,保证了其海洋皮层温度反演不确定度为0.3K。水色遥感是研究全球碳循环不可或缺的手段,已经开展业务化观测近20年,但依据平面二维水色遥感数据产品估算海洋有机碳、初级生产力等的不确定性依旧很大。试验表明,如果利用分层信息,可以将现有净初级生产力(NPP)的估算精度提高54%。
③高光谱、高几何分辨率海洋光学遥感器的信噪比问题,依然限制了其在水体环境或水色遥感中应用。
④遥感新技术的发展面临基础性机理及其现场观测技术瓶颈。比如,激光探测水体分层中所涉及的复杂水体成分偏振特性或Mueller矩阵参数测量与分析,复杂海气界面的粗糙度、波浪破碎产生的白帽与气泡层等对主动/被动光学信号传输的影响、主动/被动光学探测参数的闭合问题等。
⑤光学遥感尚未很好地实现对高动态变化海洋的全天时观测。如对夜间海洋浮游生物的变化、晨昏或极地弱光下连续生态过程的遥感监测。
⑥尚未实现海洋生命系统的直接观测。目前,除了偶然情况下的高分辨率光学与红外遥感器对大型鲸类活动的捕捉外,海洋遥感还停留在对海洋生物生存环境参数的遥感上,如温度、盐度等,或者是浮游植物的表层积分观测,对浮游动物生物量及其群落、鱼类活动的直接观测尚未实现。美国海军研究实验室(NRL)在2005年前后,就提出基于主被动光学手段三维遥感的诸多研究问题。
为避免歧义,本文所谓的“海洋三维遥感”,主要体现在3点:⑴相对传统海洋遥感技术只在X-Y平面维度和上层水体积分层面的遥感探测而言,此处的三维主要指能够在经纬度X-Y的基础上,增加深度垂向分辨的能力;⑵此处的三维海洋不是海表面的三维立体,而是指水下连续介质中三维空间位置(X-Y-Z),进而对该处水体的物理、地球化学生物参数进行探测;⑶海洋中常说的第4维是时间维,其他类似高维,如光谱维等等,不作为本文创新性三维海洋探测的重点内容,而是将其归为技术与工程实现规模问题。
本文中,海洋科学卫星计划专指非业务化应用的对地观测技术的探索试验与科学应用。美国航空航天空局(NASA)则把科学任务作了较为宽泛的定义,甚至将Landsat、Aqua等典型业务卫星都作为科学卫星计划,主要将其分为4类:天体物理、太阳系、太阳观测、地球观测。欧空局(ESA)也把任务分为两大类:业务应用类、科学与探索类。
因为中国航天领域没有类似NASA、ESA那样科技研发与行业行政管理一体化的机构,一直以行业业务应用单位主导对地观测计划。因此,中国在科学卫星规划方面,与欧美还有一定的差距;即使已有的空间科学卫星计划,也主要是面向外太空而不是对地观测。业务应用卫星倾向于采用成熟技术,具有一定的保守性;而对于科学卫星则可大胆尝试新技术,可有助于加快航天技术的迭代。若缺少对地观测科学卫星前沿科学的牵引,将对航天技术长期原创性的发展产生不利的影响。
而“海洋三维遥感”恰好可作为空间科学与技术探索的最佳领域。
二、国内外星载激光雷达技术的发展
激光雷达遥感作为一种主动光学遥感技术,是继被动光学与红外、主动微波(高度计、散射计、合成孔径雷达SAR)、被动微波之后的又一重大遥感技术,已在大气、地表、极地冰盖、月球与行星探测等方面发挥了重要的作用。自1971年Apollo15激光雷达高度计开始,国际逐步开始了空间激光雷达的研制和应用工作。在Diaz等的研究中展示了较为详尽的国际空间激光雷达发展历程,唐新明与李国元对国际、国内的测高/测绘类激光雷达有了较为全面的概括。海洋激光雷达发展历史悠久。海洋激光雷达可细分为浅海测绘型、海洋剖面型。
但在星载或空间对地激光雷达方面,海洋激光探测大大落后于大气和测绘激光雷达。国际上海洋激光雷达探测技术主要以美国、加拿大(机载)、德国、法国、澳大利亚(机载、实验室)等为主(下文将进行重点介绍);俄罗斯等国也开展了总散射偏振、荧光叶绿素、紫外溶解有机质等船载和机载激光雷达探测技术研究。
⒈空间对地观测激光雷达技术发展的里程碑
航天飞机与空间站的激光雷达空间技术试验。1994-09,“发现号”航天飞机搭载的空间技术试验激光雷达LITE成功实现大气观测。这是是空间对地激光雷达技术自1970年代提出并因激光技术局限而沉寂20年后的重要技术试验,与1990年代同期的诸多机载激光雷达技术一起,为后续空间激光雷达的发展奠定了重要的技术基础。
进入21世纪后,空间站在激光雷达的技术试验验证中仍然发挥了重要作用。2015-01发射的搭载于国际空间站ISS上的云—气溶胶输运系统CATS,将空间站作为低成本的空间对地观测技术能力试验平台的范例之一。该计划实现了若干“首次”空间激光雷达技术试验:高重频5000Hz的激光器、光子计数接收器、高光谱分辨通道的Fabry-Perot干涉仪、NASA小企业创新资助SBIR、工业级货架产品组部件(COTS)、全流程端到端(End-to-End)检验ISS低成本技术试验平台理念(从机、电、热接口规范到安全规范)等。该计划广泛吸纳国际合作团队,仅气溶胶后向散射系数产品的真实性检验,全球就有22家单位参加。可以预见,未来将有更多空间站(包括中国空间站)开展创新性激光雷达系统技术试验。
空间对地激光雷达从试验到业务化过渡。2003年1月发射的冰—云—陆地高程卫星ICESat-1上搭载了地球科学激光高度计GLAS,尽管不够成功,但却是空间激光雷达对地观测从试验到准业务化观测的重要过渡。由于激光器故障以及其他多种原因,高度计GLAS于2009-10-11停止高程数据采集,卫星于2010-02结束科学任务、停止所有数据采集。在轨运行七年,ICESat-1不仅为极地变化研究提供了支持,同时为全球高程变化探测提供了近2亿个激光点数据。GLAS也为空间激光技术提供了很多可借鉴的经验,如3台激光器的备份工作、合理的观测运控、组部件工艺技术改进等。
空间对地激光雷达首次实现长生命周期大气气溶胶业务化观测和海洋剖面观测试验。2006-04发射的CALIPSO卫星搭载的云与气溶胶激光雷达CALIOP,目前已创奇迹地运行了14年,取得了极其重要的、系统性的对地观测结果,成为空间激光雷达技术进入业务化对地观测的里程碑。CALIOP是以大气探测为主的激光雷达,但一些科学家利用其有限的上层海洋探测能力,也取得了令人瞩目的成果,包括上层海洋生物光学特性,海洋上层有机碳与初级生产力、海面风速、海气交换速率、海雾、海洋边界层温度梯度等方面的研究。基于CALIOP在海洋水体探测的成功,人们将其称为“海洋剖面遥感探测的曙光”。CALIOP不仅在被动光学遥感器难以发挥作用的弱光条件或极地环境下实现全天时海洋剖面观测(参见本文图2和图3),还直接探测到海洋浮游生物的活动(参见本文图4)。
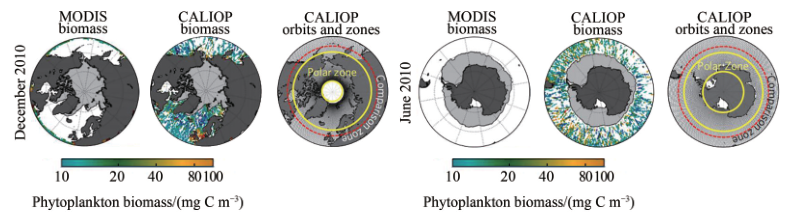
图2 CALIOP激光雷达与MODIS极地海域生态探测能力对比
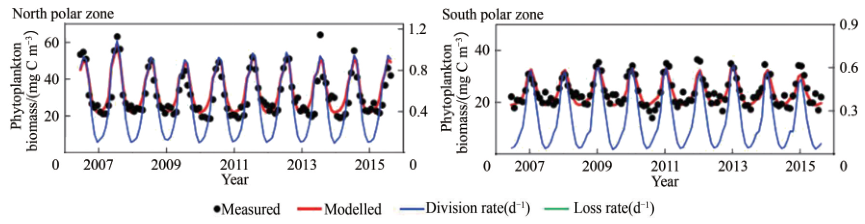
图3 CALIOP激光雷达极地海域生态探测能力
CALIOP在主动海洋光学遥感器发展中所扮演的角色与30年前(1978年)第一个水色遥感器CZCS相类似。CALIPSO及CALIOP的成功得益于数百的相关科技人员的付出,也是发达国家间国际空间技术合作的典范。为优化大气探测科学目标的实现,结合大气三维遥感探测多种手段,美法将CALIPSO和CloudSat组成姐妹星座。CALIOP激光雷达在云探测中存在不足,而CloudSat恰好只搭载了94GHz的云剖面雷达(CPR),CPR云剖面雷达与CALIOP激光雷达的足印重叠达50%,且前后过境时间只差15s。
Churnside等、Lu等文章对星载CALIOP激光雷达在海洋剖面探测中涉及的遥感器响应校正与定标、数据分析处理、海气界面影响、倾斜观测、剖面反演算法等做了相当全面的介绍,对后续空天海洋激光剖面遥感全链条过程都有很好的借鉴作用。但CALIOP水体探测的信噪比太低,只能采取1°×1°月平均数据与MODIS的数据产品进行比较。
星载激光雷达实现对地三维风场探测。激光风场观测技术自1970年代开始可行性研究,1990前后实现技术的快速进步,1990年代中期至2000年前后提出卫星激光雷达测风计划。直到2018年8月,欧洲大气动力卫星ADM-Aeolus的升空才终于将卫星激光雷达测风计划得以实现。ADM-Aeolus上搭载的多普勒测风激光雷达(ALADIN)首次实现由传统的微波散射计/全极化微波辐射计探测的海面二维风矢量场过渡到全球大气垂直剖面风矢量准三维的空间对地探测。
ALADIN的激光单脉冲能量为120mJ,重复频率为100Hz,这是迄今为止开展空间观测能量最大的355nm紫外脉冲激光器,接收望远镜口径为1.5m,这也是目前最大的空间对地观测望远镜。ADM-AeolusALADIN多普勒测风激光雷达的成功,既是20余年国际空间激光雷达科技专家共同努力的结果,也是全球风场探测计划GWOS等欧美一系列大气动力观测计划中的新一轮星载测风激光雷达的开端。早在2007年,美国国会就将全球三维风场激光雷达观测研究归为国防(尤其是空军)与民用天气业务预报最具潜在效益的计划。
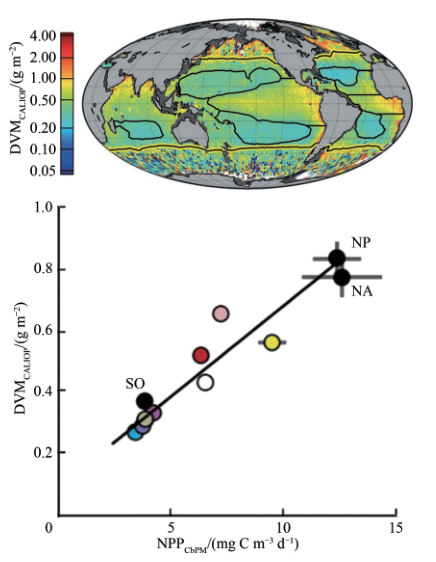
图4 利用CALIOP激光雷达直接探测地球系统最大生物种群—海洋浮游生物的日夜垂向迁徙(DVM)现象
NASA地球科学技术办公室ESTO提出的新一代空间仪器孵化计划IIP就支持多波长多角度多波束的测风激光雷达3DWinds用于三维风场的探测。多波束与光子计数空间激光雷达技术。2018-09发射的ICESat-2及其搭载的多波束激光高度计ATLAS,是对15年前不太成功的ICESat-1GLAS激光雷达的重大改进与提升,其采用多波束和光子计数微脉冲雷达技术,在高程、冰川、森林、内陆与海上浅水水深探测等方面取得了重要成果。从该计划可以预见空间星载多波束(准三维地形)、单光子探测激光雷达技术将成为重要的发展趋势。
⒉空间激光雷达海洋观测发展趋势
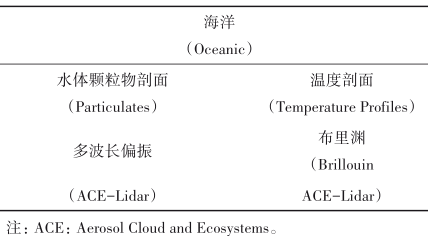
主被动光学融合观测、海洋剖面探测激光雷达计划已被提到重要位置。美国NASA在2002年前后,就提出了主被动光学遥感结合,即“海洋剖面激光雷达+海洋水色”的海洋生态探测计划PhyLM,但因当时的预算额度和技术的限制,取消了海洋剖面激光雷达部分的计划,但NASA在该计划中仍认为“未来可以通过高性能水色仪与海洋剖面激光雷达以及类似PACE计划中与偏振成像仪相融合的方式提升探测性能”。ESTO向国会提交的《Lidar Technologies Investment Strategy-2016 Decadal Update》报告中,明确将海洋激光雷达作为未来重点支持方向,其所统计的各类激光雷达技术的海洋部分节选如表1由法国与美国NASA共同提出的COOL计划(基本是CALIPSO团队),其主要载荷为全波形采样的双波长偏振激光雷达以及多光谱相机,主要用于海洋表层颗粒有机碳剖面与陆地植被的探测。该技术方案继承了CALIOP激光雷达成熟的Nd:YAG激光技术,改进短脉冲发射、全波形模拟采样,垂直方向的空间分辨率提高到1m。
表1 NASA ESTO未来激光雷达技术建议中的海洋部分
继CALIPSO、POLDER、PARASAL成功之后,“海洋水色+海洋剖面激光雷达+偏振成像仪”能更好地解决上层海洋生物光学、初级生产力、动力生态等问题已成为一个共识,在2019年举行的海洋观测大会上(OceanObs’19),国际海洋光学遥感领域30余位顶级科学家联合对此进行了阐述。
主动光学与主动微波形成对地三维观测能力的互补。预计2022年发射的ESA与JAXA合作的地球云气溶胶辐射探测卫星EarthCARE,其主要目标是获取三维大气时空结构,其主要载荷为测量云与气溶胶三维结构的94GHz多普勒云剖面雷达CPR,355nm高光谱偏振激光雷达ATLID,小型多光谱成像仪(MSI)及测量太阳短波辐射和地球长波辐射宽谱段的辐射计(BBR)。为实现主载荷的精细化三维大气观测,优化轨道设计(393km),其数据产品将有望提高天气及辐射模型的精度。该计划利用主动微波、主动光学、被动光学与红外技术,将三维大气结构与运动和地球系统辐射进行了很好地结合,其大气三维遥感的理念与技术对海洋三维遥感也具有很好的启发性。
主动光学与主动微波的小卫星伴飞观测。在地表植被精细化三维结构遥感计划中,美国NASA曾于2007年提出DESDynI计划,现在称为3DBiomass计划,包括双频(L和S频段)合成孔径雷达成像卫星NISAR(由美国NASA的L-SAR和印度空间研究组织ISRO的S-SAR合作)和植被冠层三维探测十波束激光雷达GEDI。该计划将L波段极化干涉合成孔径雷达与多波束激光雷达高度计相结合,实现主动微波与主动光学遥感的结合。为了降低系统复杂性、最大限度地优化干涉雷达和激光雷达探测,该方案曾提出将干涉雷达和激光雷达探测分别放置在不同的卫星平台上,以姐妹星座前后/上下方式飞行的方案。这种伴飞配置,或利用A-Train Constellation星座遥感器的互补特性,是三维遥感时代常见作法,如CALIPSO和CloudSat双星组成的姐妹星座。
真正实现海洋剖面的空间激光雷达探测。美国NASA自2007年提出获批、2017年再次向国会提交的气溶胶—云—海洋生态ACE计划中,主载荷包括大气海洋激光雷,云剖面微波雷达,偏振成像仪,高性能水色仪ORCA等4个仪器。其中大气海洋激光雷达采用的是大气气溶胶云—海洋剖面一体化探测的新型星载高光谱分辨率激光雷达HSRL,其主要参数包括“3β+2α+2δ+B”,即:355/532/1064nm波段的后向散射“3β”,355/532nm激光雷达衰减系数“2α”,355/532nm波段的消偏振系数“2δ”以及532nm的海洋水体布里渊散射。
ACE计划中的激光雷达将获得比CALIOP更加精细的大气气溶胶、云剖面参数和颗粒物特性参数,更重要的是由获取上层海水的颗粒物垂直剖面层化结构,进而获得水下颗粒有机碳、初级生产力等数据产品,真正实现了海洋三维剖面的有效探测。ACE激光雷达与CALIOP,CATS和ATLID等激光雷达既有继承性,又有较大的性能提升。值得指出的是,该计划自2007年启动至2017年的10年间,已取得了大量的研究成果,已利用NASALangley实验室研制的HSRL-1/2高光谱分辨激光雷达开展了约50次的航空飞行试验。这种提前十余年启动算法和航空模拟器预研,大量获取可靠试验数据,验证理论与算法的做法,非常值得学习。
甚多波束空间激光雷达技术的探测。目前国际上单波束或几个波束的大气—海洋剖面激光雷达探测的技术还面临诸多挑战。为更好地对全球地表冠层等三维结构进行遥感测量,NASA、NOAA、USGS联合于2007年提出了LIST计划,并在2009年将其纳入NASAESTO的仪器孵化计划。LIST计划设计有1000个波束、每5m一个光斑、5km刈幅。根据Yu等人的方案,以当前的光子计数接收器的水平,若每个波束需要约100?J、10kHz重频、约1ns的脉冲宽度的激光,则需要10个MOPA激光器。将每个光源再分成100束,每个MOPA激光器要以10kHz频率输出10mJ,每个激光器的功率则为100W以上。如果按照15%的电—激光转换效率,需要卫星提供7000W的供电能力,目前其机载试验已达到了16波束。Coyle等的方案则是利用光纤开关阵列等技术,已实现了机载、1×35波束小样机,但要实现1000个波束的星载,仍有很大的挑战。预计2030年前后将有卫星搭载多波束、扫描式、~10km刈幅的激光雷达载荷。对于广袤海洋的探测而言,除了卫星组网外,如果激光雷达能以扫描方式对海洋进行探测,将极大地推动海洋三维遥感在中小尺度涡旋、涡丝、锋面现象及其动力生态耦合、湍流、跃层、水下目标等方面的应用。
国际大气成分与环境激光雷达遥感计划将推动空间对地激光技术的全面发展。除了大气云与气溶胶、大气动力(风场)激光雷达之外,大气二氧化碳探测ASENDS、地球水圈观测中发挥巨大作用的重力与气候试验Grace-II计划中的激光雷达,ESA的水气Lidar计划WALES、大气二氧化碳计划A-SCOPE、甲烷气体探测计划MERLIN、掩星大气成分探测计划ACCURATE等,都将推动空间激光雷达系统技术的快速发展。
可以预见,在未来相当长的时间里,大气动力、云、气溶胶、气体等三维遥感计划、地表植被生态3D遥感探测、地形与冰川测绘、海洋生态等几大类激光雷达应用将快速发展。总之,进入21世纪后,空间地球科学应用激光雷达进入了高速发展期。
⒊中国空间对地激光雷达及海洋激光雷达应用工作
中国的星载/机载激光雷达遥感工作已开展多年并取得了很好的成效,尽管在研究的数量、深度、广度以及在科技人员数量的投入上,与欧美发达国家仍有很大的差距。《国家民用空间基础设施中长期发展规划(2015—2025年)》中,陆地、大气观测系列卫星计划以及相关部门的超前科研部署中,已对星载大口径大功率激光器,大气成分、激光测高、多波束测绘激光雷达等研制工作进行了支持。
中国已发射的空间激光雷达包括中科院上海技术物理所与上海光机所等单位联合研制的嫦娥CE-1/2系列中的激光高度计(LAM)、资源三号02卫星、高分7号双波束和即将发射的陆地生态系统碳监测卫星5波束全波形等激光雷达高度计,为中国后续空间激光雷达技术发展奠定了良好的基础。正在研制中的大气环境监测卫星的大气探测激光雷达ACDL,采用532nm/1064nm双波长高光谱分辨率偏振激光,主要探测气溶胶、云的垂直廓线,利用1572nm路径积分差分吸收方法IPDA获取CO2柱浓度,其垂直分辨率达到30m,具备一定的海洋探测能力。
从技术上评价,ACDL激光雷达是非常先进的星载激光遥感器,其高稳定性的单频窄线宽激光光源、大能量长生命周期脉冲激光器、大口径望远镜、高光谱鉴频器等技术,都可以用于未来海洋剖面激光雷达的工程研制。已纳入“十三五”民用航天预研项目的高精度臭氧探测卫星(激光雷达与被动光学相结合)、激光风场测量卫星等,都将进一步推动中国主动光学遥感技术的全面发展。
中国科学院上海光机所陈卫标团队在空间激光雷达技术、机载海洋激光雷达水下测绘与剖面探测技术等方面也取得了一系列成果;中国海洋大学刘智深、吴东、吴松华等团队,北京师范大学刘大禾与南昌航空大学何兴道、史久林等团队,华中科技大学马泳、梁琨团队,浙江大学刘东团队,自然资源部第二海洋研究所潘德炉、毛志华、陈鹏等团队,哈尔滨工业大学田兆硕、任秀云等团队,从20世纪90年代开始,先后开展了很多水下激光雷达探测相关研究。中国海洋大学作为中国海洋与大气激光雷达技术及应用的开创者之一,还在风场探测、边界层湍流与通量、偏振拉曼气溶胶水汽、创新性地利用夫琅禾费暗线压低背景噪声进行大气边界层探测的技术等方面开展了诸多研究。
另外,利用国外星载激光雷达CALIOP等数据,中国学者已开展了大量海洋—大气相关研究,如海雾、海面风速、海—气界面气体传输等。
在中国星载海洋激光雷达计划中,青岛海洋科学与技术国家实验室联合上海光机所先后提出了用于生物光学剖面探测的蓝绿双波长激光雷达、自发布里渊水体剖面温度测量激光雷达等方案,具体在本文第5部分介绍。
三、海洋剖面激光雷达技术与海洋科学应用
对于航天和航空海洋遥感探测而言,激光雷达是目前唯一可能直接穿透水体并进行水体剖面测量的技术,这种激光雷达一般称为海洋剖面激光雷达OPL,亦可简称为海洋激光雷达OL,以有别于陆地和海洋测绘等其他激光雷达技术。海洋激光雷达可将现有海洋遥感的探测能力从二维推进到三维,其应用范围涉及生物光学、生态、海洋动力(物理海洋)、目标探测等,在海洋观测中具有巨大的潜力。
激光雷达技术在水下目标探测(尤其是水雷)、浅水地形测绘中有的巨大军事和民用应用价值,这两方面的需求也是早期海洋激光雷达发展最主要的驱动力。机载(含无人机UAV)、船载(含无人艇USV)、水下潜器(小型AUV)等平台中皆有很多类似的应用。
本文将重点概括海洋剖面探测激光雷达相关技术及其典型应用,主要包括海洋水体最大激光探测深度及边界条件、生物光学剖面探测、温盐动力与声速剖面探测、海洋浮游动物及鱼类活动探测、海洋内波及次表层动力过程探测、海气界面特征参数等。
⒈海洋水体激光最大探测深度与最佳探测波长
被动光学(水色)探测的是两个光学衰减长度(AttenuationLength)内的水体光学参数(大约为入射太阳光Ed(z)减弱到表面值Ed(0-)10%的深度范围)。近岸二类水体的探测深度大概是米级(长江口是分米级)、大洋清洁水体大约是几十米水深内;而主/被动的红外、微波遥感的穿透深度只有10微米至毫米量级。
在科技部重点研发专项、青岛海洋科学与技术国家实验室观澜卫星项目等支持下,中科院上海光机所研制的机载蓝绿双波长海洋剖面激光雷达在532nm波长5.4mJ脉冲能量和486.1nm波长2.7mJ脉冲能量,重频100Hz情况下,针对大洋一类水体利用模拟和光子计数法,证明其单脉冲的探测回波信号深度已分别达到50m、70m;500次脉冲信号平均的回波探测深度已分别达到80m和105m,这个深度已经达到大部分海域叶绿素极大值SCM所在深度。
按照当前最先进的激光雷达490nm波长4个衰减长度的极限探测能力,可探测到全球海洋80%左右的混合层深度处的生物光学信号;按3个衰减长度探测能力估算,激光雷达能探测到全球大洋约58%水体的混合层深度处的生物光学信号。
若按照80—100mJ的脉冲能量、1m望远镜口径、接收10个光电子(SNR>3)进行光子计数探测能力的模拟,在最清洁的大洋水体(Clearest Case-Iwater)或甚寡营养的水体(Hyperoligotrophic Zone),将有望达到—150m的探测深度,参见表2和图5。
表2 不同波长大洋最清洁水体激光雷达探测深度的模拟参数
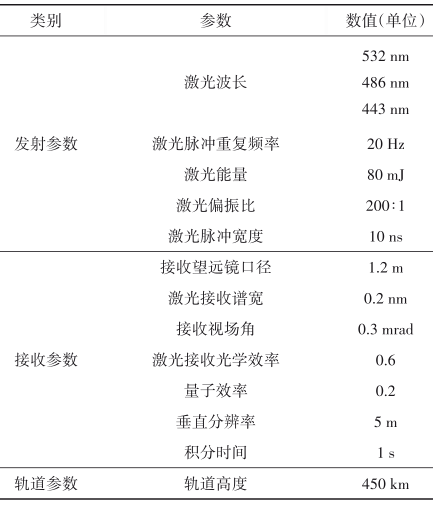
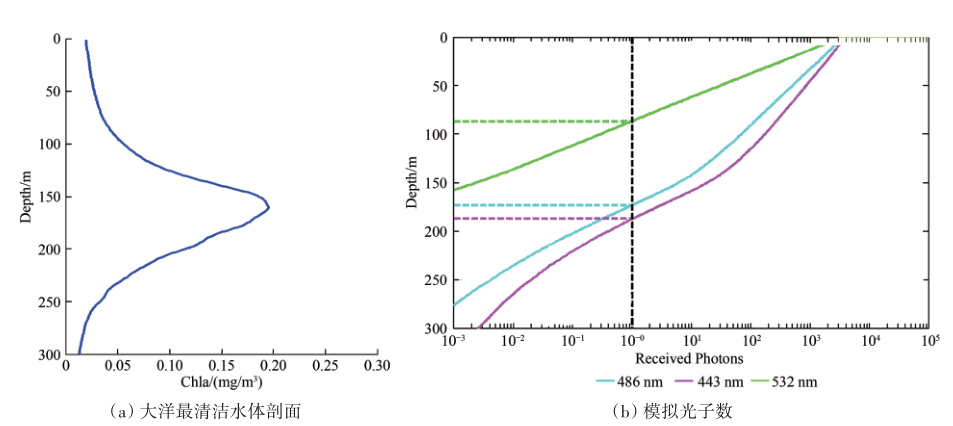
图5 最清洁大洋水体浮游植物叶绿素浓度剖面与激光光子数
根据有关全球海洋叶绿素最大值分布深度的探讨,利用遥感产品推导的结果及地球生物化学剖面漂流浮标BGC-Argo数据,约90%大洋水体的叶绿素极大值或浮游生物极大值出现在150m以内。
最大探测深度或如何能够探测到海洋跃层这个问题,是星载或机载海洋剖面激光雷达系统最主要的设计指标之一。国际上自1970年代至今,这个问题的解决始终受限于海水的复杂性及尚无明确的卫星海洋剖面激光雷达的计划,虽然国内外一些学者已开展了很多有价值的工作,但这些估算的边界条件,尚未取得一致意见。Bogucki和Spiers(2013)针对532nm激光雷达和当时的技术水平,利用全球Argo阵列温盐深剖面实测数据和MODIS生物光学遥感数据,对激光雷达能穿透多大面积比例的全球大洋均匀混合层信息进行了系统的估算,结论是532nm波长激光雷达可穿透全球50%大洋的混合层深度。
关于海洋剖面激光雷达最大探测深度及其所能涵盖的全球海洋混合面积比这两个问题的边界条件,国内有关海洋激光雷达与海洋光学专家(李忠平、陈卫标、贺岩、邢小罡、商少凌、陈树果、吴松华、刘秉义、刘东、邱国强、唐军武等)经多次讨论后认为,应该至少包括以下8个方面(尚未取得一致意见):
①采用国际公认的大洋最清洁水体的叶绿素浓度及温盐剖面参数;
②统一水体生物光学模型参数,尤其是180°的散射相函数、光谱吸收系数,以及仅有的水体Mueller矩阵;
③可探测到回波信号并可有效进行信息提取的最低信噪比(SNRmin);
④归一化激光雷达仪器类型与参数,如高光谱与总散射、弹性与非弹性,激光发射能量、海面光斑直径、接收口径与视场角、探测器效能、轨道高度、观测几何等;
⑤海洋探测最佳的激光波长,尤其是基于夫琅禾费暗线、激光光源及接收器技术上可高效实现的波长;
⑥统一白天、黑夜的背景光条件;
⑦海面风速与海面粗糙度模型、气溶胶光学厚度等海洋与大气边界条件(如平静海面还是大洋平均风速7m/s下的粗糙海面);
⑧海洋学家认可的全球海洋四维(X-Y-Z-t,三维立体剖面结合月或季度)生物光学剖面数据集。
随着激光雷达探测要素与探测性能不断进步和最新海洋剖面测量数据的积累,结合混合层或动力跃层与生物光学剖面的关系,建立公认的全球海洋四维生物光学剖面数据集和公认的模拟仿真参数,还有很多深入的工作需要进行。利用模拟仿真系统解决此问题的建议思路如下:
第1步,利用全球水色遥感获得的表层叶绿素数据对水体进行分区;
第2步,结合不同区域的典型生物—光学剖面,如BGC-Argo数据、类似关于最清洁水体的船测生物光学剖面和模式数据,结合混合层或动力跃层与生物光学剖面的关系,获得全球海洋“无缝”的、包含从表层到深层叶绿素最大值层下部的剖面分布;
第3步,利用更加准确生物光学模型,如计算浮游植物的散射时采用双层细胞模型,计算生物光学参数剖面,尤其是近180°的散射相函数,因为不同藻类的180°散射相函数相差近10倍;
第4步,带入激光雷达系统参数、水体参数进行模拟仿真,再得出激光雷达探测能力所达到的最大探测深度及其覆盖海域的面积比例;
第5步,对模拟仿真结果开展海区试验证。
从太阳光的夫琅禾费暗线上看,如果现阶段主要关注大洋清洁水体的最大剖面探测深度,可选择的大洋水体最佳穿透波段有486.1nm、438.4nm和430.8nm等。选择合适的暗线位置,有利于白天强背景光下的海洋剖面探测。需要注意的是,普通大气层外太阳辐照度光谱曲线的光谱分辨率不高,其暗线强度数据并不准确。
目前国际海洋剖面探测激光雷达技术仍处于探索试验阶段,挖掘光与水的固有特征潜力,与单纯地提高激光脉冲能量、加大望远镜口径、提高接收探测器灵敏度等措施相比,同样不可忽视。
⒉海洋上层水体生物光学剖面、初级生产力与颗粒碳的探测与反演
水体分层结构或层化现象,也称水体剖面变化,是影响诸多海洋变化过程与要素估算精度的最主要的原因之一。水体要素的层化结构又与上混合层深度、不同类型的跃层深度有关。根据不同的学科领域,跃层可分为温盐密跃层、营养物质跃层、光合作用或真光层分布导致的生物跃层等,这些跃层导致了复杂的海洋动力生态要素的垂直层化结构及变化过程。海洋跃层时空变化的极端情况之一是内波传播导致的水体温盐密度跃层及伴随的生物跃层垂向分布变化。
海洋上层水体的生物光学剖面及与此密切相关的颗粒碳、初级生产力的激光探测与反演,是空间海洋剖面探测激光雷达最可能首先解决的三维遥感科学应用问题。这主要涉及3方面复杂的问题,一是水体中影响偏振光散射和吸收的颗粒物光学模型的复杂性;二是水体层化带来的信号反演过程的复杂性;三是海气界面的复杂性。[注:大气激光辐射传输问题不在本文讨论范围]
Stramski等对水体成分的粒径分布及其散射特性做了很好的总结(图6);但该文采用的浮游植物模型为均质细胞光学散射模型。Kostner等对各种水体成分在散射中的相对贡献进行了测量分析。Organelli等在NatureCommunication上发表文章表明,针对大洋水体均质细胞假设所导致的“missing scatter”问题,利用两层(多层)细胞模型,很好地解决了传统海洋光学测量与模型中后向散射与光束衰减(总吸收+总散射)无法同时吻合的问题。而有关多层细胞模型问题实际上很早就引起了人们的注意。
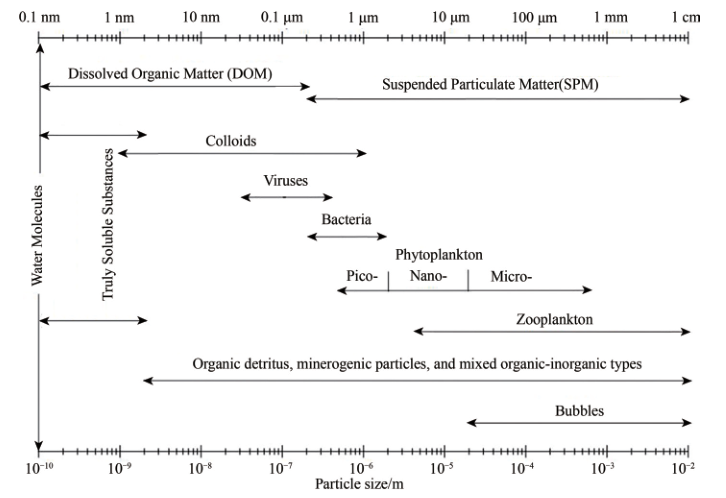
图6 海水中各种颗粒物的粒径谱分布
后向180°体散射相函数是海洋剖面激光探测最重要参数之一。Harmel等在严格的实验室测量规范下,采用3台不同的散射相函数VSF测量仪对标准颗粒物和不同藻类进行测量并理论分析。其结论是:170°后的散射迅速增加,用传统的150°附近的值外推180°处的值,会导致数倍的误差;不同藻类之间近175°的后向散射相函数差异高达3倍以上。这就对如何利用激光雷达后向散射信号才能更准确地得到其他生物光学参数提出新的挑战。
层化水体的光学模型以及层化效应带来的水色遥感误差是传统难题之一,尽管很多人试图利用被动光学手段解决这一问题,但一直没有很好的解决方法对该问题进行了简明的综述并给出了主被动光学层化剖面模型以及激光雷达探测方法。
Mignot等利用船测和BGC-Argo数据,提出了通过表层叶绿素推算叶绿素极大值深度的经验关系,但该深度与温跃层深度、营养盐剖面、前期光照条件及海洋上层风浪混合等诸多因素夫人独立或共同作用相关。
全球碳循环中的海洋角色,或海水颗粒有机碳含量及初级生产力观测,一直是海洋光学与水色遥感技术发展的重要推动力之一。通过激光雷达的水体剖面散射回波信号,可极大地改进气候变化中海洋总有机碳估算的精度,试验表明,加入实测剖面后,NPP估算精度可提升达54%。
利用CALIPSO卫星搭载的大气云与气溶胶激光雷达CALIOP“有限的”海洋次表层剖面探测能力,就有力地证明了空间海洋剖面探测激光雷达对海洋有机碳等重要海洋变量三维观测的有效性,这些结果将有力地推动未来空间激光雷达的发展。
在海洋剖面参数探测与反演方法方面,Churnside、Hostetler、Jamet和Lu等对此做了很好的综述;已有研究分别对美国HSRLLidar、浙江大学的高光谱Lidar和上光所双波长偏振激光雷达的具体技术及剖面反演进行了深入的探讨。陈鹏等对上光所机载单通道海洋剖面激光雷达(AOL-SIOM)的硬件和南海上层水体30m剖面数据分析处理方法进行介绍,并对不同Lidar剖面反演方法进行了很好的归纳;李凯鹏等利用上海光机所等联合研制的新型机载双波长剖面激光雷达数据反演出了迄今国际上最深的吸收系数剖面—有效反演数据深达80m。
海洋激光雷达的核心探测参数与被动水色遥感一样,都是水体的后向散射系数,但激光雷达更局限于小角度前向传输(约0°附近)和后向180°散射。由于水分子的散射是固定的值,水体后向散射系数的变化主要取决于水体颗粒物成分的散射。目前,水体后向散射系数的变化,尤其是180°附近的测量数据非常稀少。根据Harmel的结果,不同颗粒物的散射相函数在180°处差异可达10倍。因此,海洋或水体剖面激光雷达的首要基础研究任务是在水体颗粒物(有机、无机、气泡等)的偏振散射特性及其模型,即水体成分的Mueller矩阵。国际上在这方面的工作十分有限,包括对Voss和Fry测量结果的参数化,Yang等对Mueller矩阵对粒子形状与状态的敏感性研究、Svensen等对不同藻类及其形状与粒子谱的Mueller矩阵测量、You等开展的清洁水体水下偏振光特性测量与模拟研究以及清华大学深圳研究院马辉团队用Mueller矩阵结合神经网络对相似藻类进行分类等工作。
除了水体剖面参数,对于水体表层叶绿素,还可以采用荧光激光雷达探测,传统的532nm波段的荧光激发效率较低、且685nm荧光波长的水体衰减很强,导致剖面探测效果欠佳;但随着355nm或其他蓝光波长如486nm的技术稳定性提高,荧光激光探测作为一种海洋激光雷达的附加能力用于探测海洋表层叶绿素浓度还是有一定的价值。
目前,利用激光雷达估算生物量的工作,多是采取将激光雷达信号先反演成传统的水色遥感光学参数,如光束衰减系数等,再利用传统模式得到生物量这一过程,显然没有充分发挥激光雷达后向偏振散射信号与生物量的直接关系。要建立这个关系要求更高的基础性理论、仪器设备和高效观测方法,利用CALIPSOCALIOP获得生物量方法,可参见Hu等。
⒊海洋温度、盐度与声速剖面的激光雷达探测
温度和盐度是海洋最基本的参数。目前,现场仪器,如船载CTD或Argo浮标等,已经发展到全海深测量准确度达到0.001℃~0.003℃的水平。传统或成熟的海温遥感技术一直停留在皮层温度遥感的阶段,其中红外辐射计探测是10微米厚度,其准确度为0.3K~0.5K,微波辐射计探测的是毫米级厚度,其准确度为0.5K~1K。可以说,一旦实现水体剖面温度的探测并达到0.5℃左右的准确度水平,也将是海洋遥感技术中革命性的进展。基于布里渊散射的激光雷达就是这样一种可探测水体温盐剖面的“激光探针”。
利用激光雷达探测海洋温度、盐度剖面的遥感技术一旦实现,将使得海洋光学遥感从传统上的生物光学、水质生态等领域,扩展到物理海洋、海洋动力领域,而且是上层海洋剖面的三维海洋动力遥感,因此具有重要的科学与应用价值。
大气温度剖面激光探测技术早已成熟,但针对海洋水体的激光温度剖面测量进展相对缓慢。虽然在40年前(1970年代),国际上就提出了基于拉曼、布里渊散射激光雷达的海洋物理特性(温度、盐度剖面)探测的理论与技术方法,但布里渊技术受到单频激光器、高精度频移—谱宽检测等工程技术的限制;拉曼技术受到复杂水体成分固有的物理与生物化学光谱特性的影响、微弱信号检测能力等限制,这两项技术至今未有成熟的船载、机载和星载激光水体温度剖面遥感器。
激光在水中传播时的散射,从不同探测机理和应用层面,可分为4种:水分子的瑞利散射、水溶胶或悬浮大颗粒的米散射、拉曼散射、布里渊散射。拉曼散射和布里渊散射激光雷达都可以测量水体温度和盐度剖面(图7),且又都可分为自发的和受激的散射(在下文中的布里渊散射均指自发布里渊散射,除非特指受激),有关自发与受激布里渊/拉曼光谱探测技术的比较可参见。
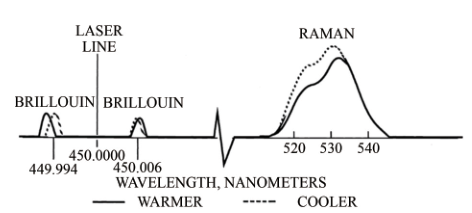
图7 水体激光非弹性散射—布里渊与拉曼散射信号
⑴布里渊光谱数据处理与分析
自1960年代开始探索水体声速等特性的探测理论与方法,1970年代开始试验性测量水体温度,经过40多年的不断发展,目前布里渊散射激光雷达已逐步接近实用化。美国德克萨斯农工大学(TAMU)的Fry、美国NASA海军海洋与大气研究实验室的Hickman等,德国TUDarmstadt的Walther、Rudolf、Popescu、Schorstein等等开展了系统性、开创性的工作。Hickman等(1991)发表的自发布里渊散射激光雷达海洋声速剖面遥感探测系统的文章,是水体剖面布里渊遥感探测技术中较为重要的研究,该文由Hickman与TAMU的Kattawar、Fry等联合研究,在532nm波长、500mJ能量、10ns脉冲、10Hz重频激光光源,150m飞行高度的系统参数下,激光雷达的剖面探测深度达到100m、垂直分辨率为1.1m,声速探测分辨率与精度达到了1m/s(在盐度一定的情况下,相当于温度精度0.4℃,或1psu盐度误差下的0.1℃温度误差)。他们在探测机理基础上,对系统信号与美国NASA海军海洋与大气研究实验室及信噪比进行了理论分析,对5种不同的Fabry-Perot标准具作为鉴频器的优缺点等进行了比较;同时,对上层100m温度剖面的应用、如何将上100m的剖面拓展到1000m、激光雷达剖面与高度计获得的温盐剖面的联合应用等,给出了多方面有价值的建议。至今,距离该项工作的发表已经30年了,国内外多个团队在间断性攻关,但公开报道中尚未见到实用化的航空布里渊激光雷达遥感系统出现。
Fry等对布里渊激光雷达探测精度的物理极限进行了理论分析,并给出了鉴频精度分别在1MHz、探测深度75m和4MHz、100m时,盐度误差在某个特定值时的剖面温度探测误差:1个盐度(1‰或1psu)的不确定度所带来的温度探测误差是0.4℃;在盐度确定的情况下,1MHz的频移检测精度对应的温度误差是0.06℃、声速误差是0.25m/s,对应4MHz频移精度的温度误差则是0.5℃,声速误差为1m/s;淡水的布里渊温度探测误差仅为0.06℃(即只有频移不确定性带来的温度误差)。
Fry等对布里渊线宽与温度的关系进行了研究,为后续布里渊谱探测器技术的发展提出了新的研究方向。北京师范大学刘大禾、中国海洋大学刘智深、吴东等在国内开展了早期开创性的布里渊研究工作;华中科技大学的马泳、梁琨、余寅等,哈尔滨工业大学田兆硕、高玮、任秀云等都开展了许多系统性的布里渊理论与技术研究工作。国内外布里渊散射激光雷达的相关工作,在任秀云等,华灯鑫和王骏文章中,也都做了很好的综述。
虽然受激布里渊技术难以在运动平台实现遥感探测,但其很多理论和技术与自发布里渊密切相关。北京师范大学刘大禾及南昌航空大学何兴道、史久林等,在受激布里渊散射激光雷达方面做了大量国际前沿性工作。1995年前后,刘大禾与Fry等合作,在国内率先开展了布里渊散射激光雷达的相关研究工作,用布里渊散射方法测量了水中声速,并给出了声速相对于盐度及布里渊频移的函数关系,实验室布里渊频移的测量精度可达到1MHz,声速测量精度小于0.22m/s;建立了布里渊散射线宽及频移与水体粘滞系数的关系式,首次提出了用布里渊散射的方法来测量水的体粘滞系数,线宽测量精度可达到10MHz,体粘滞系数的测量不确定度值为1.022×10-5Pa.s;他们通过研究受激布里渊散射特征参数与水体参数之间的关系,为受激布里渊散射激光雷达水体参数测量提供了依据;在此基础上,设计了基于受激布里渊散射的雷达探测系统,并可用于水下目标探测。
与自发布里渊相比,受激布里渊由于其必须对深度或剖面方向上调焦,只能用于海上平台、现场船舶或直升机悬停测量,不适于高速运动的固定翼飞机和卫星等平台,因而其遥感应用受到极大的限制。当年中国高技术863海洋领域,由于经费、激光光源和信号检测技术的受限以及主要想突破大探测深度等因素的影响,连续两个五年计划都集中在信号相对较强、探测深度较大的受激布里渊散射方面的研究,而未有同步支持自发布里渊的研发工作。
目前,国际上实现布里渊频移检测的技术大体上有3种:一是分子吸收池方式;二是基于Fabry-Perot标准具的方式;三是基于激发态法拉第反常色散滤波器(ESFADOF)技术。
布里渊散射探测的优势是基于频移检测,与其他激光雷达技术相比,类似于无线电中调频FM与调幅AM技术,归纳起来主要有4个优势:
①频移检测,抗干扰能力强,适于复杂水体成分下的温度剖面探测;
②探测温度剖面的同时,具备水下目标探测能力;
③可以测量海洋激光遥感的基本参数—180°后向散射系数;
④在实用的精度下,声速误差0.2m/s、温度误差0.1℃(本文作者注:从现实的工程技术进展来看,显然这个指标过于乐观了),大洋水体声速和温度剖面探测深度可达100m,这个深度涵盖了大约80%大洋海域的上混合层深度。
但激光布里渊散射探测的工程技术也面临很大的挑战:
①光学机理上,水体布里渊散射信号相对较弱。532nm的后向180°布里渊体散射函数约为2.4×10-4m-1sr-1,同时加上边缘滤波器对信号的总有效透过率只有50%,以及光电转换效率的影响,进一步减少了光信号的强度,导致探测信噪比减低,从而影响鉴频精度,降低了温度探测的精度;
②对激光光源的单频稳频特性、接收器的边缘滤波器或鉴频器的稳定性要求极高,需要在MHz级的精度上进行控制。
布里渊激光雷达探测声速和温度,是利用水体布里渊散射的频移与声速、温度、盐度、折射率、压力和波长的关系:
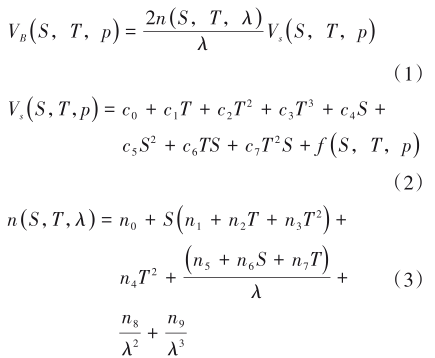
式中,VB布里渊频移,在7~8GHz之间;S、T、p分别为水体盐度、温度和压力;n为水体折射率;Vs为声速;λ为光波长。
这式⑴—式⑶中存在5个未知量,因此,必须再有两个独立观测量才能求解上述方程。这两个量中一个是激光雷达探测的布里渊频移VB,另一个可以是盐度S,因为大洋的盐度变化范围相对较小,而淡水的盐度可以看做是0。由此,可以将剩余的3个参数,表示为VB和S的函数:T(S,VB)、Vs(S,VB)、n(S,VB)。
Fry等之所以是以1个盐度的不确定度进行的误差分析,是根据1996年之前的气候态数据数据中的盐度的不确定性而估算的。自2000年后,随着最新的Argo浮标数据和其他海洋观测数据的增加,气候态盐度数据与实测的差值将稳定在一个更小的范围。2019年,发布的最新气候态海洋数据World Ocean Atlas2018(WOA18),为评估海洋盐度数据与实测盐度的差异提供了新的数据支持。
观澜海洋科学卫星海洋剖面激光雷达工作组利用2019年的全球Argo浮标测量的盐度数据对其盐度的误差进行了检验,结论是:在80%情况下,δS≤0.3psu(或0.3‰),在90%的情况下,δS≤0.5psu。
由此可以看到,盐度不确定性导致的温度剖面误差将在90%的概率程度上小于0.2℃。可以看出,先验盐度数据,是影响布里渊温度探测精度的主要因素之一。关于盐度的不确定性,目前可有4条可改进的途径:
①利用最新的WOA数据集;
②结合全球近4000个Argo浮标的温盐剖面数据对气候态WOA数据进行修正;
③利用卫星高度计获得的海面高度及其反演的中尺度过程,结合物理海洋模式,对气候态的盐度数据进行进一步的订正;
④利用合成孔径微波辐射计盐度遥感得到的结果对数据进行修正。
⑵拉曼激光雷达海洋剖面测量
在自发拉曼散射激光雷达水体温度盐度剖面探测方面,基于Walrafen等的基础性工作,国内外团队开展了很多相关研究。
Leonard等为该方向理论与试验的作出了奠基性工作包括激光拉曼信号的温度测量机理、定量化计算公式、拉曼光谱信号的正态分解、偏振信号对温度的敏感性、系统信噪比、极限探测深度与精度、海气界面及水体成分等多种干扰因素分析等;在当时的条件下,其估算的探测能力为60m水深(约大洋清洁水体2个光学衰减长度,温度误差为±1℃)。
澳大利亚Macquarie大学Artlett和Pask做了大量系统性和实验性的工作,包括蓝光/绿光激发光源、全谱段接收、多波长、偏振信号接收及其反演算法、温度盐度联合探测与反演等,其实验室内512个脉冲平均后的超纯水和自然水体的温度测量精度达到±0.5℃;通过改进算法,最高精度则达到了±0.2℃。
韩国Oh等(2015)的实验研究与理论分析表明,激光拉曼测温技术在4.5个衰减长度、1s采样、1m距离分辨率、考虑散弹噪声约束的情况下,其温度分辨率为0.2℃、准确度为1℃。韩国Lee,Park与俄罗斯Bunkin等人联合开展了包括上层海洋水体拉曼光谱探测的直升机航空遥感试验。俄罗斯Bunkin等与挪威Marchenco等利用一个紧凑型拉曼激光雷达系统开展了海水及漂浮海冰的观测工作。
中国海洋拉曼激光雷达遥感与现场探测技术工作也是由中国海洋大学刘智深、吴东、郑荣儿、郭金家以及上海光机所陈卫标等团队率先开始;哈尔滨工业大学田兆硕、任秀云、孙兰君等开展了很多有价值的工作。总体上,海洋剖面拉曼激光雷达的发展大大落后于大气拉曼激光雷达。
海洋拉曼温度测量技术主要有全光谱法、多通道法;与布里渊散射法相比,其主要优势是系统实现的难度相对较低容易实现,且体积重量可以实现小型化,便于无人机等搭载。
拉曼激光雷达水体温度剖面探测主要有四个局限:
①拉曼光谱区域容易受到不同水体成分光谱吸收特性、蓝光或绿光激光所激发的水体不同成分的荧光影响。532nm绿光所激发的680nm处的叶绿素a荧光峰与630nm~665nm范围的水体拉曼峰有一定的重叠,会导致温度探测误差;如450nm蓝光所激发的水中黄色物质(DOM)和其他光学活性成分荧光信号与520nm~540nm水体拉曼光谱相重叠;尤其是在河口和近岸复杂水体,其情况将更加严重。DeLimaRibeiro等对此进行了讨论,提出了两种荧光校正的方法。如何消除水体成分荧光对水温及盐度测量的影响,这方面研究还只是开始,仍有很多深入细致的工作需要开展(当然,从另外一个方面看,激光荧光也可以作为水体成分探测有效手段)。
②由于水体分子形成拉曼双峰光谱比较宽,导致接收的信号中背景光干扰和噪声非常大。
③技术相对成熟的532nm激光所激发的拉曼波段位于630nm~665nm红光波段,而红光波段的水体吸收系数很大,拉曼散射光在水中的衰减很快,因此剖面探测深度有限。
④在20nm~30nm左右光谱范围内,不论是利用全谱段分光测量还是采用位于温度敏感处的多波长宽谱段探测器,都需要较高光谱分辨率的光强测量及峰值识别,因而小信号的信噪比也会受到影响。
总体上看,未来海洋拉曼激光雷达的应用应以蓝光光源为主。其主要有两个优势,一是激发的拉曼散射在绿光范围内,水体的衰减小,且拉曼散射截面积大,因而剖面深度将大大优于532nm绿光拉曼系统;二是很大程度上避开了叶绿素a荧光峰这个水体中主要色素的荧光影响。但蓝光光源与532nm绿光相比,其工程技术成熟度和稳定性不高。将拉曼散射的偏振信息信号应用于温度反演算法中,可进一步提高温度探测精度。
⒋海洋生物活动的激光雷达直接探测
海洋遥感是全球海洋渔业可持续开发利用和资源管控的重要技术支撑手段之一。在激光雷达技术出现之前,尤其在星载CALIPSO激光雷达之前,除了高分辨率光学和机载激光雷达对大型海洋哺乳动物的观测之外,海洋遥感技术对海洋鱼类、微生物等的活动遥感观测基本上都是间接的,通过对其生存环境要素的遥感,如水色(浮游植物、营养状况)、水温图像及海面高度基础上的锋面、洋流、水团、重构的三维温盐场等分布情况的探测,对生物分布及其活动规律进行观测预报。
传统的海洋光学水色遥感技术,对夜间等弱光条件下海洋生物活动的剧烈变化以及极区极夜生物与生态变化无法感知,激光雷达的出现,将大大弥补传统被动光学手段的不足。与被动光学的积分式后向漫射光场遥感相比,海洋剖面激光雷达对水体中的浮游植物(粒径在0.5~1000?m)、浮游动物(2?m~1cm)、游泳动物(>1cm,1cm~33m)、水下人工目标(0.3m~200m)等的分层回波信号,是一种更加直接的生物体和目标探测信号。有关海洋浮游生物及水体中各种颗粒物的粒径分布,可参见Stramski等文献。
本文仅就鱼群探测、海洋生物的日夜迁徙、极区生物的月季变化等极轨激光雷达可泛在探测的生物群体活动相关应用的探测需求与方法进行简述,并对后续需要配合激光雷达遥感器及其生物活动数据的现场观测与真实性检验技术等进行讨论。值得指出的是,应用于大型鱼类和海洋哺乳动物的激光雷达探测技术也具有很高的军事海洋应用价值,如潜器等。
⑴鱼群的激光雷达探测
激光雷达的鱼群探测和渔业应用,早在1970年代便开始了,主要是基于总信号偏振散射的532nm脉冲激光雷达开展可行性研究与机载飞行观探测试验等。美国NOAA的Churnside团队是这方面的先驱者,其文章对此作了很好的综述,Churnside和Hunter的研究中Table1提供了多种类型探鱼激光雷达系统;中国学者关于激光雷达探鱼的综述之一可参见栾晓宁等。
美国NOAA以JamesH.Churnside为首所开展的激光雷达渔业观探测实施活动可详见:www.psl.noaa.gov/technology/instruments/floe,主要集中在1995年~2000年之间,尽管该网站的文献目录在2003年后也不再更新,但相关活动依然在开展。另外,美国NOAA还与日本、挪威、西班牙、俄罗斯等合作开展了激光雷达渔业应用试验。根据这些试验,与传统声学探鱼技术相比,激光雷达探鱼具有以下5方面优势:
①鱼群种类的识别;
②鱼群密度的定量估计;
③大范围鱼群探测的效率;
④避免鱼群对船舶噪声的躲避行为造成的探测失效;
⑤浅表鱼群的探测。
相比于传统的船舶拖网、水声等技术,发达国家的渔业公司利用轻型飞机进行鱼情观察有着悠久的历史,机载激光雷达在离岸或距离岛礁数百海里区域内的近海/中海渔业资源管理、调查与评估方面是有一种有效的管理工具,尤其是随着作业半径可达2000km、载荷重量数百甚至上千公斤、载荷功率1000W以上的中远程大型无人机的发展。
美国NOAA1990年代的海豚安全研究计划(Dolphin-SafeResearchProgram)中的一项针对水声对海洋哺乳动物影响的研究中,应用了5套激光雷达系统作为辅助技术手段,包括:国家海洋渔业服务中心NMFS的Osprey、KamanFISHEYE成像激光雷达、NOAA的FLOE、Arete的3D条纹管成像激光雷达等。国际上鱼群探测激光雷达系统主要代表是美国NOAA的FLOE。美国的Kaman航空KF-100FishEye系统也做过探鱼应用,但目前主要开展的是利用激光雷达进行水雷等水下目标探测的安防应用。
经过45年的发展,与早期研究人员和渔业管理人员的直观感觉和预期结果不同,激光雷达鱼类探测技术,除了科学研究应用外,在渔业经济上尚未发挥太大的作用。人们期待的鱼类区分、对高价值深水鱼类进行探测等方面并未有太大进展。除了技术与运行成本制约外,一方面是由于激光雷达探测深度和扫描范围的限制;另一方面是针对鱼类活体激光反射特性、鱼类激光信号与传统声学信号的对比等基础研究非常困难,尚未系统展开,目前也仅有针对沙丁鱼、马鲛鱼等个别的鱼种反射率及偏振特性的研究。有报导的活体鱼种激光反射率仅有沙丁鱼,其他都是对实验室冻鱼进行测量。
激光雷达渔业应用总体上进展缓慢,国际上许多发达国家自1970~90年代开展的很多激光雷达鱼类探测活动都处于停滞状态;中国在激光雷达渔业探测应用也有过一些探索,但没有得到持续的研发和应用资助。
总体上,机载激光雷达的鱼群探测,主要受限于航空飞行的经济性和激光雷达的可探测深度、航线密度或扫描范围。如果星载海洋剖面激光雷达得以实现,在很大程度上可以弥补航空遥感经济性价比低的缺陷,对全球大洋上层鱼类分布、极地磷虾等持续监测,为全球海洋渔业资源的管控和可持续发展提供有力的技术手段。
⑵海洋生物日夜迁徙的激光雷达探测
世界上最大生物群体—海洋浮游动物和游泳动物的垂向日夜迁徙DVM是地球生命系统中一个非常重要的现象,海洋剖面探测激光雷达可为此领域的研究提供不可替代的技术手段。浮游动物因其个体数密度低(稀疏性)、运动动态变化大、光学特性差异大、现场采样与观测更加困难等因素,与浮游植物的观探测有很大不同。
浮游动物日夜垂向迁徙,也是研究海洋生物碳泵BCP相关机制的重要过程,在海洋碳循环中扮演着重要的角色。
浮游动物与浮游植物相比个体较大(2?m~1cm)、个体能量密度高,虽然其数量在正常情况下比浮游植物少3~4个数量级,但在海洋食物链中有重要的意义。其数量与运动变化对高级海洋生物,如海洋经济鱼类的数量、分布及其不同生长阶段的状况有着更加直接的影响。
对激光雷达遥感而言,几个重要的浮游动物参数是:单位体积的个体数量丰度、物种丰度、生物量、个体形状尺寸分布(粒径谱)及其光学的等效散射截面积、折射率、偏振特性等。显然,开展其光学特征参数的系统研究是个很大的挑战,目前仅有个体的体积数量、生物量、形状等的相关研究。
以南海北部开阔海域为例,浮游动物在不同的季节,数量丰度大概在15~220个/m3左右;在太平洋200m以浅的上层水体,其范围在50~200ind/m3(图8);地中海开阔水域浮游动物及其迁徙也在类似的数量级。但近海大陆架海域的浮游动物数量与垂向分布与大洋水体有明显的区别。
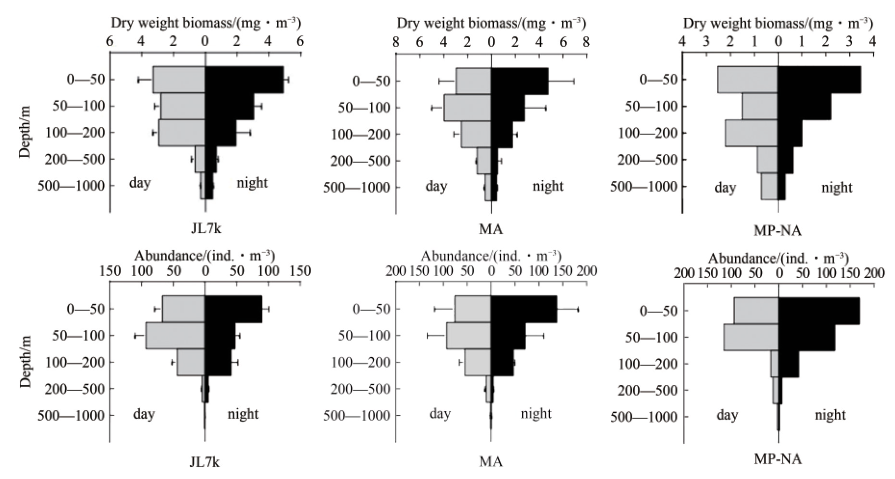
图8 典型浮游动物数密度的剖面分布
对于浮游动物的尺寸和数量密度,现有的固有光学测量仪器尤其是开放式的后向散射仪,如Hobilabs Hydroscat-6、Seabird-WetlabsBB9等,是可以探测到浮游动物的相对数量分布的,尽管因为缺乏针对其数量密度与散射信号关系的研究因而存在较大的不确定性。但很可惜的是,传统的海洋光学测量中,通常把这些由浮游动物引起的随机高散射信号当成噪声而滤除;被动光学中的表观光学仪器,如水面以上光谱仪、水下剖面光谱仪,难以从其辐亮度或辐照度光谱上直接测量和提取浮游植物信号,除非已知特定地点浮游动物的聚集再开展针对性的光谱观测;在走航生物光学测量系统中,或类似Seabird-WetlabsACs等带水泵与粗滤装置的现场固有光学仪器,在水样粗滤时就把大部分浮游动物过滤掉了。因此,传统的光学手段用于研究浮游动物时存在很大缺陷,这也为后续研制新型浮游动物光学测量仪器、激光雷达定标检验现场仪器设备等提出了新需求。
在海洋浮游动物激光雷达探测和光学遥感试验中,一些学者开展了利用传统拖网及声学手段进行对比研究,如Churnside利用420kHz的回声探测仪(echo-sounder)。
利用搭载在CALIPSO卫星上的CALIOP大气激光雷达有限的海洋上层观测能力所获得的10余年昼夜的长时间序列观测数据,并结合多年稀疏的船载多普勒海流计(ADCP)浮游动物观测数据、两个10年以上长期连续锚系观测站—百慕大时间序列站(BATS)、夏威夷时间序列站(HOT)的资料,Behrenfeld等对全球海洋浮游动物的昼夜垂直迁徙进行了研究,受现场观测和激光雷达数据的限制,其网格精度为5°×5°,但很好的展示了垂直迁徙的趋势(图9)。该方面的科学应用成果,将有望进一步牵引空间海洋激光雷达技术的发展。
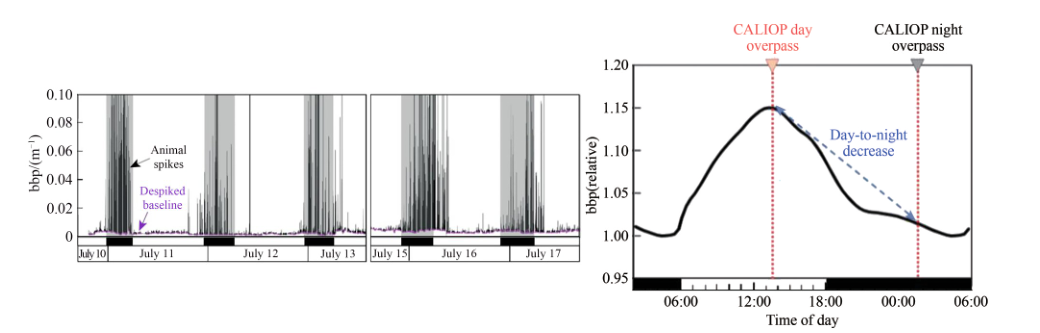
图9 因昼夜浮游动物垂向迁徙导致的上层水体现场与激光雷达后向散射信号变化
⒌海洋内波等次表层动力特征的探测
利用水色、红外遥感技术对典型海洋动力过程,如涡、锋面、洋流、内波等的水平分布探测,已是比较成熟的技术。但对次表层动力过程,包括上文提到的温盐密跃层,如内波的深度、涡旋的垂直结构等的直接探测,目前看来也只能由剖面激光雷达来实现。利用激光雷达探测水平或水下动力过程,主要基于以下3种探测机理:
一是由于海洋水体分层界面,即所谓各种跃层处,往往是浮游生物活动、碎屑沉降的富集之处(水平方向也是如此),因此由分层水体扰动所产生的内波(IW,也称内孤立波),可以从激光雷达的后向散射信号中明显分辨出来。
二是不同流动速度和流动方向的水体及其与周边水体的相对运动,在边界处产生剪切,使得极不规则的水体颗粒物的取向有了很大的改变,从而导致其与自由运动时的散射截面及偏振特性产生很大的变化。
三是利用水体颗粒物运动导致的激光多普勒频移,但该方法由于频移极小的原因,尚难以实现剖面分层测量。次表层的内波,是水平空间尺度上从1~1000km、时间尺度上从分钟—小时级、垂直深度从十米到千米量级的巨大跃层变化过程,其携带的能量也是惊人的,对水中构筑物(如钻井平台、钻杆等)、水下潜航器的航行安全等有灾难性的后果。中国南海北部、吕宋海峡附近就是全球海洋的内波高发区。
传统上,利用微波合成孔径雷达SAR和光学成像仪的太阳耀斑图像可以获得内波的波长等水平参数,进而推导出内波其他参数。但水下或次表层垂向信息除了激光雷达外,其他遥感手段难以直接获得。
早在1970年代中期,美国的Walker等(1982)就利用船载激光雷达证明了激光雷达海洋内波探测的可行性。
NOAA在一个地形复杂、水深小于20m的浅水湾水域,开展了多个架次的航空激光雷达内波观测试验,配合普通的民用数码相机(Nikon D300+18—200mm镜头)记录海面影像以便对激光雷达沿航迹内波参数观测进行比对分析,现场以温盐深剖面仪(Seabird CTD)和固有光学测量仪器(Wetlabs AC9)做配合测量,以便确定导致内波的水体分层结构及浮游生物散射层与内波界面之间的关系。尽管试验装备非常简单,但却在激光雷达剖面特性分析、线性内波的波长及能量谱计算、内波能量的剖面湍流耗散等方面给出了重要的应用结论。
俄罗斯科学院应用物理研究所Dolin&Dolina系统地发展了一套激光雷达信号内波探测的理论,并利用现场CTD及光吸收散射数据模拟仿真了内波对激光雷达信号的影响,但其理论实用性的检验未见正式文章。
Marcos等利用专门的试验装置研究了海水流动对浮游植物等非球形粒子取向的影响其散射信号的变化,散射信号变化原理和实验室装置参见图10所示,其中各种粒子可近似为等效椭球体,当一个椭球体方向是随机分布、还是近似与流向对齐时,其等效散射截面积有很大的变化,从而导致实验中前向/后向偏振散射数据高达10%~30%的变化。

图10 在剪切流作用下的非球形颗粒物的取向发生变化导致体散射函数及散射的变化
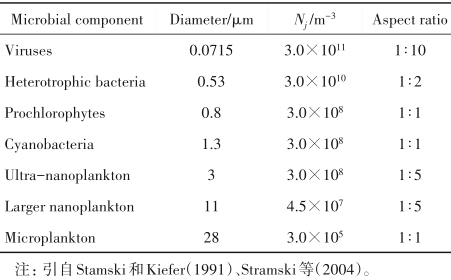
海水中粒子的长宽比(AspectRatio)越大,海流对其影响就越大。而海水中病毒、细菌、藻类的长宽比可在1∶1~1∶10之间变化,参见表3。
McFarland等(2020)对长宽比差异较大的甲藻在水体中的方向及其对光吸收的影响也做了理论分析和试验测量,其光衰减的影响量高达24.5%。
这些初步的研究,给人们利用激光探测自然水体的运动和湍流扰动提供了很好的指引,但仍需深入细致地开展全矢量化(偏振)光学特性与现场光学显微成像对比测量等具有很大挑战性的基础工作。
表3 海水中不同有机颗粒物的粒径、数密度与长宽比
⒍海气界面及海上边界层的精细化剖面探测
界面问题作为任何电磁波探测的基本问题和难点问题,对海洋剖面的激光探测、被动光学上表层遥感都具有重要的影响;同时,高垂向分辨率的海洋剖面激光雷达,可为海气边界层参数的探测提供不可替代的技术手段。海气界面的研究主要集中在以下几个方面:
①海面粗糙度及海面风速;②海气交换速率;③气泡层及其对主被动光学遥感探测的影响;④近海表飞沫;⑤海雾探测;⑥海洋边界层温度梯度估算。
⒎海洋激光雷达其他应用
①浅海地形测绘与水下目标探测。激光雷达浅海地形测绘与水下目标探测,星载激光海面高度与测地学应用等应用,受主题和篇幅的限制,不在此展开。
②激光、水声与跨介质通讯。充分利用海洋中水声远距离传播与光学高速和精细化的通讯与测量一直是海洋领域的梦想,这个过程中,最主要的问题是跨海气界面与水体剖面的激光传输问题在跨海—气界面水下声学信号感知方面,Churnside利用激光雷达探测水面气泡对水声振动的响应;还曾利用水面波纹探测水下强声源。
四、海洋剖面激光探测的其他基础性问题
⒈主/被动光学参数的闭合问题
1990年代,随着水色遥感的发展,Zaneveld等提出了海洋光学中的表观光学量(AOPs)与固有光学量(IOPs)之间的闭合问题。被动水色遥感中的闭合问题已基本得到解决,其中包括Lee等提出的QAA算法及后续的改进算法。
随着激光剖面探测技术的发展和深入,由于主动激光探测的方式是基于近180°小角度范围后向散射及其偏振信号,而不是一般传统海洋光学遥感的标量(无偏振)漫射光场。因此,激光探测的信号及其反演参数,如何与传统水色或被动光学测量或遥感参数之间建立高精度的定量化关系,成为一个核心的基础性问题。我们将此问题称为主被动光学参数的关系问题(或第二类闭合问题,Closure-IIProblem),主要包括以下几个方面:
①180°后向散射的测量技术及其与其他角度散射的关系。尽管传统光学(水色)和激光雷达遥感探测的都是后向散射信号,但传统水色基本是一个大角度范围的后向散射问题,在建立遥感反射比Rrs与后向散射bb和吸收a之间的函数关系时,即Rrs=f(bb/(a+bb)),人们过去测量后向散射是利用120°(如WetlabsBB9)或140°(如HobilabsHS6)的值代表后向散射的平均效应。但在海洋激光雷达遥感中,探测的是180°附近极小角度的后向散射,但这个角度散射特性很少有人测量,不同藻类和无机颗粒物的180°偏振散射特性知之甚少。直到2000年后,才出现可在现场测量大于175°的体散射相函数测量仪器,其中Lee和Lewis(2003)测量角度范围为0.6°~177.3°,Shao等(2006)的角度范围为0.5°~179.5°,Chami等(2014)的为1°~179°,郭乙陆等(2020)等的为3°~178°。这些测量仪器,可以有效解决近180°后向散射快速增加、从150°处外推存在数倍误差的问题。
②激光偏振散射与复杂颗粒物水体Mueller矩阵测量。一般而言,由于激光信号是偏振的,因此,是矢量辐射传输问题。其中最基本的问题是海水介质(含复杂颗粒物的水团)对激光信号的响应,也就是含颗粒物小水团的Mueller矩阵的现场测量或采水样后在实验室内的测量与分析。
迄今,海洋水体Mueller矩阵实测数据非常稀少,经典的数据为Voss和Fry;Svensen等对不同藻类的Mueller矩阵进行了测量与分析。其他有关Mueller矩阵测量原理与技术的文献,还可参考Chipman;Hovenier;Savenkov等。
③激光直接探测与反演水体生物光学参数的真实性检验。原理上,水体分层激光后向偏振散射信号,携带了比被动光学标量后向散射更多的颗粒物特征信息,但目前缺乏深入的、精细化的、系统性的试验测试与分析,这需要开展大量的基础性工作。
激光信号与传统海洋光学参数的一些模型和关系、初步的真实性检验等工作,可参见:海洋颗粒物后向散射系数bbp、漫衰减系数Kd、光束衰减系数c等。
⒉激光海洋与大气剖面及复杂海气界面一体化模拟仿真工具
在被动光学遥感(水色)的发展过程中,Mobley等所形成的水体光学模拟仿真软件系统工具Hydrolight发挥了极其重要的作用,基于该软件工具,新人得以快速入门并开展研究工作、高级究人员基于模拟仿真结果已发表了数以千计的高级别论文。但基于激光雷达的主动海洋光学剖面探测,截止目前,还没有得到行业认可的、普遍可用的商业化软件工具。中国几乎所有的海洋激光雷达遥感团队,都有自己的MonteCarlo或类似的模拟仿真工具,但从软件工程的角度来看都不尽成熟。如果能尽快推出海洋与大气剖面一体化模拟仿真软件,将是对国际激光雷达海洋遥感的重要贡献。
国内外在海洋激光辐射传输模型和Monte Carlo模拟仿真方面已开展了大量的工作。本文主要关注可适应于任意水体层化、海气界面特性和其他边界条件的真三维光场、带偏振或矢量化MonteCarlo模拟的少数代表性工作进行简要归纳。
美国迈阿密大学的Gordon等利用MonteCarlo方法模拟海水的辐射传输过程,证明均匀海水中固有光学特性与表观光学特性存在一定的关系,通过分析多次散射的影响,证明激光雷达消光系数依赖于激光雷达系统的参数与水体的光学特性。
美国TAMU大学GeorgeW.Kattawar团队在海洋、大气、生物光学等MonteCarlo模拟仿真方面处于国际领先地位,并且很早就开始了有关海洋偏振激光雷达信号的模拟仿真工作,建立了较为完备水体偏振光学理论与模型。他们在美国海军研究办公室(ONR)Radianceina Dynamic Ocean(RaDyO)项目的支持下,开发了兼顾被动与主动光学探测、包含大气—海气界面—海洋的真三维矢量MonteCarlo模拟仿真系统,其光源和探测器可以处于介质中的任意位置后续又开发了一套后向散射MonteCarlo模型,可用于海洋水体及生物体组织中的偏振光场模拟。Adams等利用MonteCarlo方法对在地中海测得的辐射度和偏振度进行模拟,证明了MonteCarlo方法可以模拟偏振光在水下的传输。
Stegmann等利用优化的矢量化Monte Carlo求解程序,模拟激光雷达光束在由大气层、上层海洋层以及粗糙海洋表面组成的大气—海洋耦合模型中的传播过程,研究球形浮游植物形态变化在激光雷达衰减后向散射和退偏比的垂直分布。Walker和Mclean利用MonteCarlo方法对光束扩展函数的解析模型进行模拟验证,提出了具有多重散射光束扩散和脉冲展宽的激光雷达方程,适用于各种激光雷达在海洋环境(浊度和测深)和云(气溶胶散射)的研究应用。
俄罗斯大气光学研究所的Krekova等借助MonteCarlo方法模拟机载激光雷达探测鱼群,研究激光雷达探鱼返回信号的谱线形状规律;Krekov等利用MonteCarlo方法对激光雷达返回信号的深度剖面和偏振特性进行了模拟,并计算了不同类型水体的激光雷达返回信号偏振特性,证明了偏振激光雷达在检测不同来源的非均匀水体的可行性。
中国科学院上海光学与精密机械研究所的梁波等基于蓝绿激光穿过大气海洋的信道效应和物理特性,利用MonteCarlo方法实现对光信道的仿真。自然资源部第二海洋研究所的Chen等提出了改进的MonteCarlo辐射传递模型,该模型适用于非均匀的水体,可有效解决复杂的散射相位函数,显著提高建模精度;利用半解析MonteCarlo方法模拟激光在非均质海水中浮游生物层内的传程过播,通过分析水体的光学特性、多重散射、风力驱动的海面状况以及激光雷达入射角的影响,证明激光雷达消光系数取决于激光雷达系统的视场。中国海洋大学刘秉义、孔晓娟等针对海水中激光传输时复杂的多次散射效应问题,利用基于统计权值的半解析MonteCarlo方法,对不同水体条件下船载激光雷达的水下光场分布进行模拟,并与HydroLight软件的模拟结果及Z.P.Lee的结果进行比对以证明其可行性。浙大的刘东团队利用半解析Monte Carlo方法建立了高光谱激光雷达剖面信号、激光雷达衰减系数与海水深度、海水固有光学特性之间的关系,为星载海洋激光雷达反演海水固有光学特性提供了方法,利用MonteCarlo仿真模型开展了多次散射效应对HSRL回波光谱影响的研究,证明多次散射导致的光谱变化对HSRL反演的影响相对较小,HSRL光谱鉴频原理在多次散射条件下仍然可靠;对其偏振海洋激光雷达MonteCarlo辐射传输模型利用船载实测结果进行了检验。
五、“观澜”海洋科学卫星与海洋剖面探测激光雷达
⒈“观澜号”海洋科学卫星计划简介
2016-12,青岛海洋科学与技术试点国家实验室(以下简称“海洋国家实验室”)首次提出“观澜号”海洋科学卫星计划(Chen等,2019),其主要特点是:
⑴科学应用目标。主要面向3个方面:①海洋涡动与能量级联;②海洋跃层与全球变化;③海洋生命与生态变化。
⑵遥感技术创新。①探索实现“海洋三维遥感”,支撑“透明海洋”、观测体系;②突破海洋涡旋及相关亚中尺度过程探测技术;③突破上层海洋百米级剖面遥感探测技术;
⑶主要载荷为主动微波与主动光学相结合:①主动微波载荷:长基线(≥12m)、Ka+Ku雷达干涉成像仪系列;②主动光学载荷:海洋剖面激光雷达系列。相关辅助载荷为:传统星下点高度计、水汽校正微波辐射计;轻型水色仪等。
⑷工程计划目标。在中国海洋业务应用卫星的基础上,开启海洋科学卫星系列计划,形成中国空间海洋观测领域业务应用卫星与科学卫星双驱动发展模式;未来10年计划发射3颗卫星;技术与科学探索试验小卫星争取在2023年前后发射,寿命1~2a,完成载荷关键技术与指标验证和初步科学应用;综合大卫星争取在2025年前后发射,寿命3a。
总体上,观澜号海洋科学卫星系列,是面向海洋科学前沿需求,争取在国际上率先突破新一代“海洋三维遥感”技术,为国际海洋观测提供中国解决方案。观澜海洋科学卫星的探索性技术,将逐步转化到业务应用卫星中,支撑国家海洋遥感事业的发展。
目前,卫星平台及长基线展开机构、载荷相关关键技术攻关已取得重大进展,工程总体方案及技术路线初步确定,两个主载荷的数字样机、原理样机校飞已经完成并取得了重要创新成果,其中蓝绿双波长海洋剖面激光雷达的机载校飞试验及其结果(图11),可参见李凯鹏等对研究。
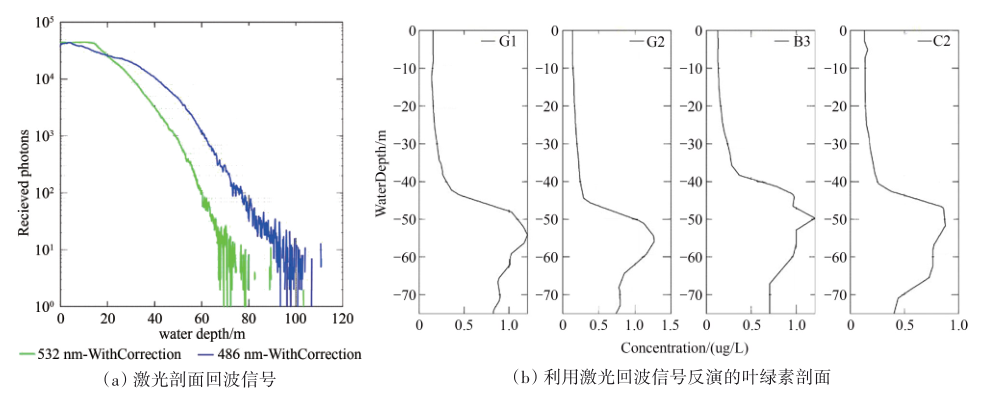
图11 机载双波长海洋剖面激光雷达探测与反演信号(500个剖面累积平均)
观澜卫星计划也对系列化空间海洋剖面探测激光雷达发展做了一个发展规划,总体上,在15~20年的时间里,按照技术复杂度,从单波长总散射双偏振星载激光雷达的技术试验开始,逐步发展蓝绿双波长总散射偏振、高光谱分辨率、布里渊温盐剖面、多波束海洋剖面激光雷达等。
⒉观澜卫星蓝绿双波长海洋剖面探测激光雷达
针对海洋剖面探测,观澜卫星在国际上首次提出在传统成熟的532nm通道的基础上,增加486.1nm夫琅禾费暗线蓝光通道,结合平行与交叉偏振信号,形成一个蓝绿双波长多偏振海洋剖面探测激光雷达D-OPL。
这种设计的优点是:②486nm大洋穿透深度大大优于532nm,而532nm在近岸浑浊水体的穿透深度更大,这样就更好地兼顾了大洋和近岸水体剖面的激光探测、稳定成熟技术与先进技术的平衡;②486.1nm夫琅禾费暗线通道可有效降低白天探测的太阳背景光,有利于提高白天探测的信噪比。
该设计的风险在于尚没有稳定有效的空间激光技术获得大功率、高稳定、长寿命的486.1nm激光光源。
上海光机所基于这种理念设计和研制的机载双波长海洋剖面激光雷达,在国际上首次获得了近百米的海洋剖面信号。
六、结语
海洋激光雷达技术作为海洋三维遥感的主要技术手段之一,在地球系统科学、海洋科学与未来空间海洋观测中有着广阔的应用前景。自1970年代提出空间激光海洋观测设想,受空间激光技术、海洋剖面探测机理的双重约束,50年后的今天依然未能实现专门针对海洋剖面探测的空间激光雷达系统。
对比大气、陆地测绘等空间激光技术的发展,海洋剖面探测激光雷达发展滞后20年以上,尽管目前国内外学者在激光海洋现场观测仪器、生物光学剖面探测、星载非海洋激光雷达数据的海洋应用等方面取得了很多成果,但迫切需要更多激光遥感的专家学者投入海洋激光探测领域。
作者也希望通过本文,引起中国航天科技管理部门及科技发展部门的重视,加大对海洋激光探测技术的支持。从现有的技术探索情况来看,中国有望在国际上率先在激光雷达空间海洋剖面探测技术领域取得突破。
本文试图就海洋剖面激光探测理论、技术与应用发展进行综述,以期对有兴趣从事海洋激光遥感的同仁有所帮助。但受时间和篇幅的限制,难免挂一漏万;且受作者自身知识与经验的局限,难免有错误之处,希望广大读者予以批评指正。
致谢?本文得到了青岛海洋科学与技术试点国家实验室“观澜号海洋科学卫星工程”、山东省重大科技创新工程“新一代海洋科学卫星总体设计及关键技术研发与集成”(2018SDKJ0102)、科技部海洋环境安全保障“新型海洋大气边界层动力学剖面自动观测系统研发”(2019YFC1408000)等项目的支持。文献资料得到了中国海洋大学王运华、胡连波、曾侃、戴光耀、张洪玮、朱培志等协助;相关问题的讨论与参考文献,得到了浙江大学、南昌航空大学、华中科技大学、哈尔滨工业大学(威海)、自然资源部第二海洋研究所、航天科技集团(501、508、东方红卫星公司)、西安理工大学等团队的支持;“海洋三维遥感”及海洋剖面激光雷达遥感工作,得到了自然资源部国家卫星海洋应用中心、中国科学院空间应用工程与技术中心等大力支持。在此一并表示感谢!
【作者简介】文/唐军武 陈戈 陈卫标 赵朝方 贺岩 吴松华 刘秉义 毛志华 何惠馨 杨杰 陈树果 胡连波 何兴道 史久林 郑永超 刘建强 林明森 吴立新 郭华东 蒋兴伟 潘德炉 顾逸东,分别来自青岛海洋科学与技术试点国家实验室、中国海洋大学、中国科学院上海光学精密机械研究所空间激光传输与探测技术重点实验室、自然资源部第二海洋研究所卫星海洋环境动力学国家重点实验室、南昌航空大学无损检测技术教育部重点实验室、北京空间机电研究所、国家卫星海洋应用中心、中国科学院空天信息创新研究院数学地球重点实验室和中国科学院空间应用工程与技术中心。第一作者唐军武,1965年出生,男,研究员,研究方向为海洋光学遥感及定标检验技术、海洋观探测技术与装备;通信作者何惠馨,1993年生,女,博士研究生,研究方向海洋激光雷达的蒙特卡洛模拟。本文为基金项目,国家重点研发计划(编号:2019YFC1408000)、山东省重大科技专项(编号:2018SDKJ0102)。文章来自《遥感学报》(2021年第1期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,本文编发已取得作者授权,转载也请备注由“溪流之海洋人生”微信公众平台编辑与整理。
来源:溪流之海洋人生”微信公众平台。